
Системы линейных однородных уравнений
3.3. Системы линейных однородных уравнений
Система линейных уравнений называется однородной, если свободные члены уравнений равны нулю. Такая система имеет вид
Однородная система всегда совместна. Это следует из теоремы Кронекера-Капелли. Кроме того, значения неизвестных  образуют решение системы, оно называется нулевым или тривиальным.
образуют решение системы, оно называется нулевым или тривиальным.
Для однородной системы важно установить, имеет ли она ненулевые решения. Ответ на этот вопрос следует из второй теоремы Кронекера-Капелли.
|
Теорема. |
Для того чтобы однородная система имела ненулевые решения, необходимо и достаточно, чтобы ранг матрицы системы был меньше числа неизвестных. |
Следствие 1. Если в однородной системе число неизвестных больше числа уравнений, то система, помимо нулевого решения, обладает еще и ненулевыми.
Следствие 2. Для того чтобы однородная система ![]() линейных уравнений с
линейных уравнений с ![]() неизвестными обладала и ненулевыми решениями, необходимо и достаточно, чтобы определитель системы равнялся нулю.
неизвестными обладала и ненулевыми решениями, необходимо и достаточно, чтобы определитель системы равнялся нулю.
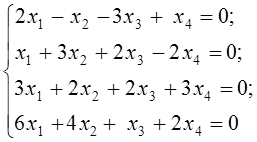
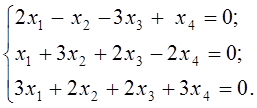
Пример 16. Решить однородную систему четырех линейных уравнений с четырьмя неизвестными
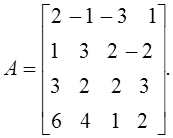
Найдем ранг матрицы системы
|
|
Если сложить первые три строки и эту сумму вычесть из четвертой строки, получим |
|
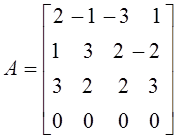
Как, видим определитель матрицы ![]() будет равен нулю, и ранг будет меньше
будет равен нулю, и ранг будет меньше  .
.
Так как есть определитель третьего порядка, отличный от нуля,
![]()
то ранг матрицы равен трем. Следовательно, система имеет и ненулевые решения.
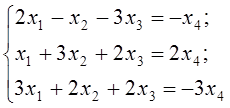
Заданная система эквивалентна такой:
Мы взяли первые три линейно независимых уравнения с определителем, не равным 0. Так как определитель, состоящий из коэффициентов при неизвестных  , отличен от нуля, то, перенеся
, отличен от нуля, то, перенеся ![]() в правую часть, решим систему трех уравнений с тремя неизвестными
в правую часть, решим систему трех уравнений с тремя неизвестными
![]()
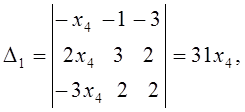
Решим систему по правилу Крамера:
![]() ,
,![]()
Следовательно,

 .
.
Для контроля можно подставить это решение во все четыре заданные уравнения системы и убедиться, что система решена правильно. Для нахождения любого конкретного решения необходимо задать значение ![]() и подсчитать соответствующие значения других переменных.
и подсчитать соответствующие значения других переменных.
4. Элементы векторной алгебры и метода координат
4.1. Векторные величины и действия над ними
Величины, для характеристики которых достаточно задать их численное значение (например, температура, объем, масса тела, плотность и т. д.), называются скалярными величинами или скалярами.
Величины, которые кроме своей абсолютной величины характеризуются еще и направлением (например, сила, скорость, ускорение и т. д.), называют векторными. Выбрав единицу длины, векторные величины можно изображать геометрическими векторами.
Вектором называется направленный отрезок или упорядоченная пара точек. На чертеже вектор изображается отрезком прямой, на котором отмечено направление (рис.1). Над буквенным обозначением вектора, имеющего началом точку ![]() , а концом точку
, а концом точку ![]() , ставится стрелка:
, ставится стрелка: ![]() . Вектор обозначают также и одной буквой, но напечатанной жирным шрифтом:
. Вектор обозначают также и одной буквой, но напечатанной жирным шрифтом: ![]() или
или ![]() .
.
|
|
|
|
||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||
|
|
а |
|||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||
|
Рис. 1 |
Рис. 2 |
К векторам будем относить и так называемый нулевой вектор, у которого начало и конец совпадают. Он обозначается ![]() .
.
Расстояние между началом и концом вектора называется его длиной или модулем. Модуль вектора обозначается так: ![]() или
или  .
.
Векторы, параллельные одной прямой или лежащие на прямой, называются коллинеарными, а векторы, расположенные в одной плоскости или параллельные одной и той же плоскости, – компланарными. Радиус-вектором точки ![]() называется вектор, направленный из начала координат в точку
называется вектор, направленный из начала координат в точку ![]() (это вектор
(это вектор ![]() ).
).
Два вектора  (рис. 2) называются равными, если они коллинеарны, одинаково направлены и равны по длине. Равенство векторов записывается так:
(рис. 2) называются равными, если они коллинеарны, одинаково направлены и равны по длине. Равенство векторов записывается так:  . Если векторы имеют одинаковую длину, но противоположные направления, то они называются взаимнопротивоположными.
. Если векторы имеют одинаковую длину, но противоположные направления, то они называются взаимнопротивоположными.
Из определения равенства векторов следует, что при параллельном переносе вектора получается вектор, равный исходному. Поэтому начало вектора можно помещать в любую точку пространства. Векторы, начало которых при параллельном переносе можно помещать в любую точку пространства, называют свободными.
Над векторами можно выполнить различные линейные действия:
а) Произведением вектора а на число называется вектор ![]() , имеющий (при
, имеющий (при  ) направление вектора
) направление вектора ![]() , если
, если  , и противоположное направление, если
, и противоположное направление, если  . Длина вектора
. Длина вектора ![]() равна произведению длины вектора а на модуль числа
равна произведению длины вектора а на модуль числа ![]() . Следовательно, вектор
. Следовательно, вектор ![]() коллинеарен вектору
коллинеарен вектору ![]() . Результат умножения вектора
. Результат умножения вектора ![]() на число
на число ![]() записывается равенством
записывается равенством  .
.
Отметим, что вектор, длина которого равна единице, называется единичным или ортом. Для любого вектора ![]() имеет место равенство
имеет место равенство ![]() , где
, где ![]() – единичный вектор, указывающий направление.
– единичный вектор, указывающий направление.
б) Суммой векторов называется новый вектор ![]() , который замыкает ломаную линию, построенную из данных векторов так, что начало каждого из последующих векторов суммы совмещается с концом предыдущего. Замыкающий вектор
, который замыкает ломаную линию, построенную из данных векторов так, что начало каждого из последующих векторов суммы совмещается с концом предыдущего. Замыкающий вектор ![]() направлен из начала первого вектора суммы к концу последнего (рис. 3).
направлен из начала первого вектора суммы к концу последнего (рис. 3).
|
|
|
|
|
||||||||||||||||||||||
|
|
|
||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||
|
Рис. 3 |
Для суммы векторов принята запись  .
.
Правило параллелограмма для сложения двух векторов: сумма двух векторов ![]() и
и  , приведенных к общему началу О (рис. 4), есть вектор-диагональ
, приведенных к общему началу О (рис. 4), есть вектор-диагональ ![]() параллелограмма, построенного на данных векторах.
параллелограмма, построенного на данных векторах.
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||
|
|
|
|||||||||||||||||||||||||
|
|
|
|||||||||||||||||||||||||
|
|
|
|||||||||||||||||||||||||
|
|
|
|||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||
|
Рис. 4 |
Рис. 5 |
|||||||||||||||||||||||||
Правило параллелепипеда для сложения трех векторов: сумма трех некомпланарных векторов  ,
,  ,
,  , приведенных к общему началу О (рис. 5), есть вектор-диагональ
, приведенных к общему началу О (рис. 5), есть вектор-диагональ ![]() параллелепипеда, построенного на данных векторах:
параллелепипеда, построенного на данных векторах:
в) Разностью двух векторов ![]() и
и ![]() называется такой вектор
называется такой вектор ![]() , который при сложении с вектором
, который при сложении с вектором ![]() дает вектор
дает вектор ![]() , т. е.
, т. е.  , если
, если  . Вектор разности будет являться второй диагональю параллелограмма, направленной из конца вычитаемого к концу уменьшаемого.
. Вектор разности будет являться второй диагональю параллелограмма, направленной из конца вычитаемого к концу уменьшаемого.
Чтобы построить разность  , приведем векторы
, приведем векторы ![]() и
и  к общему началу О (рис. 6), тогда разность представляет собой вектор, соединяющий их концы и направленный от “вычитаемого” к “уменьшаемому”.
к общему началу О (рис. 6), тогда разность представляет собой вектор, соединяющий их концы и направленный от “вычитаемого” к “уменьшаемому”.
Заметим, что линейные операции над векторами установлены в соответствии с физическими законами, приводящими к сложению векторных величин или умножению их на число.
|
|
||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|||||||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||
|
Рис. 6 |
Рис. 7 |
г) Проекцией вектора ![]() на ось
на ось ![]() называется длина отрезка, заключенного между проекциями начала и конца вектора на эту ось (рис. 7).
называется длина отрезка, заключенного между проекциями начала и конца вектора на эту ось (рис. 7).
Проекция вектора ![]() на ось
на ось ![]() равна произведению модуля проектируемого вектора на косинус угла между положительным направлением оси и вектором.
равна произведению модуля проектируемого вектора на косинус угла между положительным направлением оси и вектором.
Обозначают проекции так: 
 .
.
Выразим проекции вектора ![]() на оси координат
на оси координат
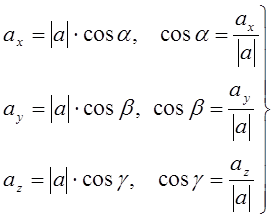 направляющие косинусы вектора
направляющие косинусы вектора
где  – это углы вектора с осями координат.
– это углы вектора с осями координат.
д) Скалярным произведением двух векторов  называется число, равное произведению их модулей на косинус угла между векторами
называется число, равное произведению их модулей на косинус угла между векторами![]()
Из формул для проекций получаем другое выражение скалярного произведения

Скалярное произведение двух векторов равно произведению модуля одного из них на проекцию второго на направление первого вектора.
Скалярное произведение векторов обладает такими свойствами:
1.  – скалярное произведение коммутативно.
– скалярное произведение коммутативно.
2. Для любого вектора ![]() скалярный квадрат равен квадрату модуля:
скалярный квадрат равен квадрату модуля:  .
.
3.  – скалярное произведение дистрибутивно относительно сложения.
– скалярное произведение дистрибутивно относительно сложения.


